

Here is a list of my peer-reviewed publications, including my three journal papers.
|
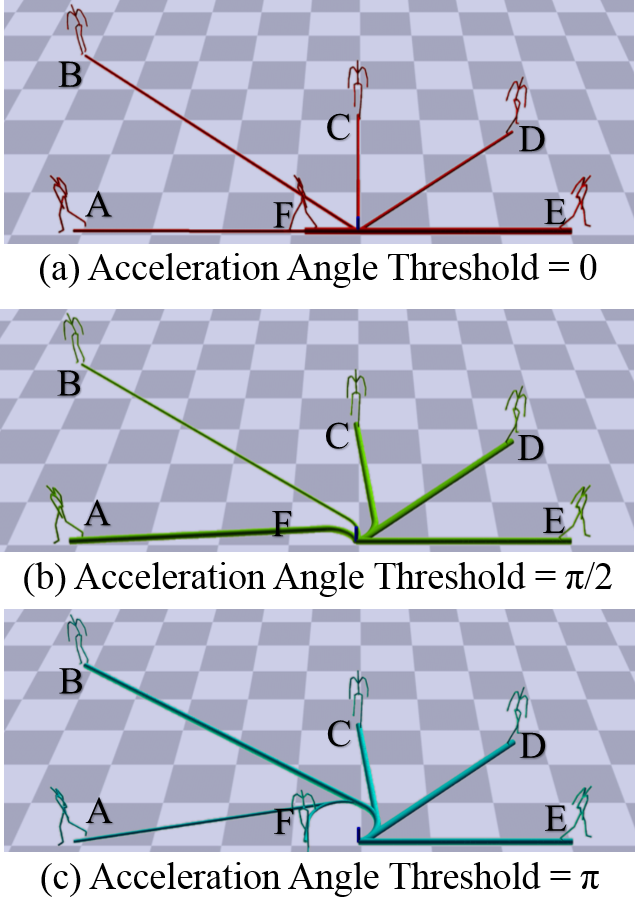
Optimal Acceleration Thresholds for Nonholonomic AgentsBrian Ricks and Parris EgbertVisual Computer, June 2014Finding optimal trajectories for non-accelerating, nonholonomic agents is a well understood problem. However, in video games, robotics, and crowd simulations nonholonomic agents start and stop frequently. With the vision of improving crowd simulation, we find optimal paths for virtual agents accelerating from a standstill. These paths are designed for the "ideal", initial stage of planning when obstacles are ignored. We analytically derive paths and arrival times using arbitrary acceleration angle thresholds. We use these paths and arrival times to find an agent's optimal ideal path. We then numerically calculate the decision surface that can be used by an application at run-time to quickly choose the optimal path. Finally we use quantitative error analysis to validate the accuracy of our approach. 

|

|
A Whole Surface Approach to Crowd SimulationBrian Ricks and Parris EgbertTransactions on Visualization and Computer GraphicsRecent crowd simulation algorithms do path planning on complex surfaces by breaking 3D surfaces into a series of 2.5D planes. This allows for path planning on surfaces that can be mapped from 3D to 2D with distortion, such as multistory buildings. However, the 2.5D approach does not handle path planning on curved surfaces such as spheres, asteroids, or insect colonies. Additionally, the 2.5D approach does not handle the complexity of dynamic obstacle avoidance when agents can walk on walls or ceilings. We propose novel path planning and obstacle avoidance algorithms that work on surfaces as a whole instead of breaking them into a 2.5D series of planes. Our ``whole surface" approach simulates crowds on both multistory structures and highly curved topologies without changing parameters. We validate our work on a suite of 30 different meshes, some with over 100,000 triangles, with crowds of 1,000 agents. Our algorithm always averaged more than 40 FPS with virtually no stalling.
|
|
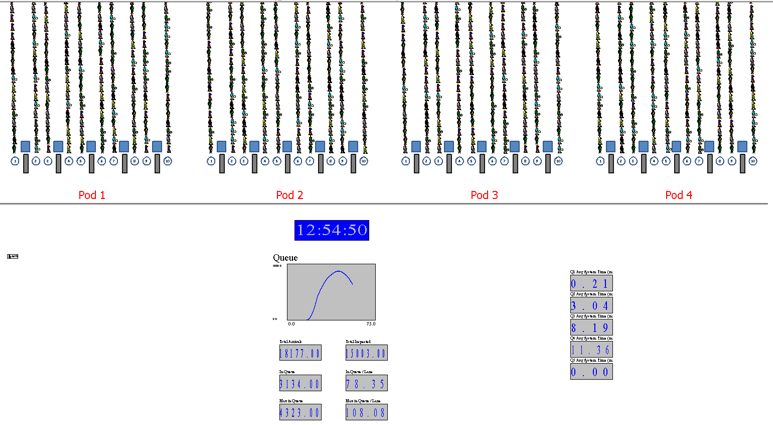
Modeling the Impact of Patron Screening at an NFL StadiumBrian Ricks, Brian Nakamura, et al.Proceedings of the 2014 Industrial and Systems Engineering Research Conference (Homeland Security Track)The Department of Homeland Security identifies stadium safety as a crucial component of risk mitigation in the US. Patron screening poses dif?cult trade-offs for security of?cials: rigorous screening prevents weapons from entering the structure, but it also creates lines that become security hazards and may be infeasible if patrons are to get into the stadium within a few minutes of the beginning of the game. In order to quantitatively inform venues about how different screening procedures will affect their venue, we developed a patron screening model together with security personnel at a National Football League (NFL) stadium. Our model speci?cally addresses the speed of screening using different procedures: walk-through magnetometers, wandings, and patdowns. We then created a real-time simulation of queue formation using the physical arrangement of gates at the stadium. This allowed for analysis based on different patron screening procedures and con?gurations. We validated our model and simulation using ticket scan data and security director experience. Our approach is generic enough for any stadium and has been used to explore inspection protocols at multiple venues including an NBA arena. We also successfully demonstrated our work to NFL Security.
|

|
ACCAM Global Optimization Model for the USCG Aviation Air StationsChristie Nelson, Brian Ricks, et al.Proceedings of the 2014 Indurstial and Systems Engineering Research ConferenceA model was created for the United States Coast Guard (USCG) to maximize aircraft fleet operational performance subject to budgetary constraints, or, conversely, to minimize aircraft fleet operational costs subject to performance targets. This is a two-stage model: The first stage, prior work, is a simulation model of each USCG Air Station generating performance metrics resulting from various scenarios. Each scenario is determined by a large number of relevant Air Station attributes, including stationed aircraft, operational level, historical Search and Rescue mission response, historical maintenance processes, deployment requirements, and other mission requirements. The second stage, to be presented, is an optimization model over the structured set of scenarios to determine the optimal deployment assignments, operational levels and aircraft allocation among all USCG Air Stations, under the current infrastructure. Additionally, the optimization model is used to demonstrate the potential efficiencies of proposed infrastructural changes.
|
|
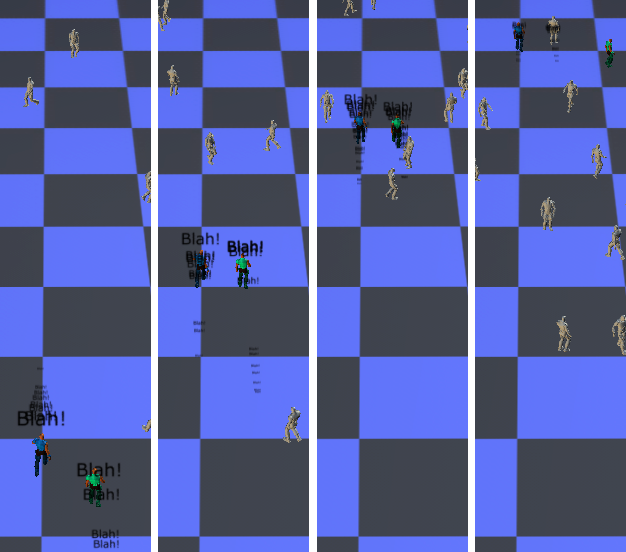
More Realistic, Flexible, and Expressive Social Crowds using Transactional AnalysisBrian Ricks and Parris EgbertVisual Computer CGI 2012 Special EditionRecent algorithms have been able to simulate �social crowds� that allow agents to interact socially as opposed to only treating other agents as obstacles. Unfortunately, past social crowd algorithms lack realism and flexibility because they do not allow agents to move in and out of different and repeated social interactions, are built around a specific obstacle avoidance algorithm, or are tuned only for a specific social setting and do not allow for artist directed changes. We propose a new, simplified social crowd algorithm that focuses on the evolving social needs of agents and allows each agent to join and leave different encounters as desired. Our algorithm is based on the psychology research area of transactional analysis, does not require a specific obstacle avoidance algorithm, and allows for easy artist direction for determining the precise social environment being simulated. Our algorithm runs in real-time with 3,000 to 4,000 agents without the restrictions of previous research. DOI 10.1007/s00371-012-0712-1.
|

|
Social Crowds Using Transactional AnalysisBrian Ricks and Parris EgbertIntelligent Computer Graphics 2012More and more applications are relying on simulated crowds to populate films, games, and architecture. Decades of work in this area has produced agents that deftly avoid collisions, but the crowds still look stiff and false because agents do not socialize naturally with each other. On the other hand, ours is a new, expressive algorithm for adding social dynamics to crowds that breathes a new dimension of realism into simulations. Unlike previous approaches, our work allows agents to have multiple social encounters with other agents. We correctly allow interactions to evolve as time passes using the psychological area of transactional analysis. Additionally, we break from previous paradigms since we do not tie our approach to a specific obstacle avoidance algorithm. Instead our algorithm has a flexible architecture that will run with almost any obstacle avoidance algorithm. Finally, we allow for artist direction in our simulations, including bi-modal crowds and social environments that can be changed in real-time. Our results show that our social crowd algorithm runs in real-time with up to 4,000 agents with far more realistic behaviors than previously simulated.
|

|
Real-time Synthetic Vision Visibility Testing on Arbitrary SurfacesBrian Ricks and Parris EgbertComputer Graphics International 2012One of the key features of 2D real-time strategy(RTS) games like StarCraft II or serious games for training is visibility testing for each unit. Visibility testing provides functionality like fog of war, non-player character (NPC) activation, and realistic artificial intelligence. With the advent of path planning and crowd simulation algorithms on arbitrary surfaces, the technology is almost available for RTS games to move from the 2D plane to complex surfaces like multi-story buildings, subways, asteroids, space ships, or surfaces where insects swarm, such as a hive or colony. We propose a novel synthetic vision approach to visibility testing that allows features like fog of war for RTS games on arbitrary surfaces. Unlike previous synthetic vision algorithms, our algorithm is specifically designed for nonplanar surfaces and surfaces that have not been labeled manually, in addition to meeting the real-time demands of RTS games. Our resulting algorithm does visibility testing for up to 100 or more units in real-time on complex surfaces and allows RTS and serious games to use non-planar surfaces in a manner that has not been possible before.
|

|
Improved Obstacle Relevancy, Distance, and Angle for Crowds Constrained to Arbitrary Manifolds in 3D SpaceBrian Ricks and Parris EgbertEurographics 2012Recent work has proposed crowd simulation algorithms on arbitrary manifolds in 3D space. These algorithms simulate crowds on far more realistic surfaces than previously possible, including multi-story structures, science fiction scenarios, and habitats for insects and other animals that can walk on walls. However, current implementations can have distinct artifacts, including collision false positives and false negatives. Also, current implementations fail to account for the cylindrical shape of the characters being simulated. The resulting crowds move unnaturally and have obvious collisions. After identifying the cause of these artifacts, we propose an algorithm that does not struggle from these false positives or false negatives and correctly accounts for the non-spherical shape of agents. The resulting crowds move on large surfaces (over 100k triangles) running with a thousand agents in real-time.
|

|
Graph-based Global IlluminationBrian Ricks and Parris EgbertComputer Graphics International, Ontario, Canada, June 2011Global illumination algorithms are used in numerous commercial and academic settings; however, these algorithms are still considered slow. We show that ray casting global illumination algorithms could converge faster by taking advantage of redundant ray casts, and we propose a technique for quickly identifying and reusing these ray casts. Graph-based global illumination, our general-purpose ray casting optimization, uses these variance-reducing techniques to accelerate rendering. Unlike other algorithms that reuse information, our algorithm can handle all BRDF types and does not have noticeable artifacts. By optimizing path tracing with graph-based global illumination, on average the new algorithm converges in half the time.
|